Ƥ������ϵ�y����Ƥ���\ݔ�o��ֵ��
�l���ߣ�ɽ�|�����i늚�����˾2019-11-12
�����Cе���Q�ˣ��Ԅӻ��p�ˣ��ǵV���ĸ�ı���֮·���ڽ���������a�^���У�ɽ�|�����iͨ�^���g�σ���ϵ�y�����a���{������C�ƣ����I�σ����ڄӽM�������F�ˡ�һ�����p�����aģʽ����V����ȫ�lչ�춨�˻��A��
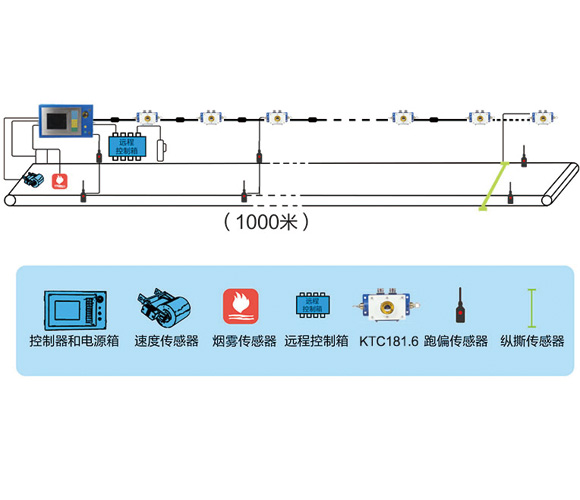
����ɽ�|�����iKTC181Ƥ�����п���ϵ�y����ݔ�;��x�h��ݔ�����������Y�����β������ھS�o�����Էdz�����،��г����ƺ��Ԅӻ�������Ƥ�����п���ϵ�y�����͵ء����ء��z�����N��ͬ�Ĺ���ģʽ��һ�����ϵ�y�\���ڼ��ع���ģʽ�£����M�����a��ˮ���r�����C����ǰ���]�i�Pϵ�Ԅӆ�ͣ��ͬ�r�z�y���z�y���o�O��Ġ�r���\�о͵ع���ģʽ�r�������T�քӲ������o���ӣ�ֹͣƤ��ݔ�;��������е�Ƥ��ݔ�͙C���o�O���Ͷ��ʹ�ã��\�Йz����ģʽ�r�������T�քӆ���/ֹͣƤ�������o�O������x���Ե�Ͷ���ʹ�ã�Ƥ�������\�С�������ʽ�ĸ�׃������Ҫ��Ƥ��ݔ�͙Cͣ�C�r�M�С�
����ɽ�|�����iKTC181Ƥ������ϵ�y�ڳ����OӋ�У���ͣ܇�ȹ�����̖�Ԅӱ��֣���һ���l��������̖����ʹ���S����̖��ʧ��Ӌ��C���Ա�����̖���Ϡ�B��Ƥ��ݔ�͙CҲ�ɰ�����ú�����ӣ��ú���ӕrͣ܇�����Ҿ������]�i���ܡ�Ƥ��ݔ�͙C����ϵ�y������Ƥ��ݔ�͙C���ٴ��C�^��ú�����؞�ˮ�����F���LͲ���ء��ؾ���ͣ����ƫ�ȶ�N���o��Ƥ��ݔ�͙C�������_�P����̖�l�����R�ϰl����ͣ��ָ�����ϵ�y�����R�e�Ă���ͣ�_�P�� �����l�������_�P���
����ɽ�|�����iKTC181Ƥ������ϵ�y��Ƥ��ݔ�͙C�Ķ�ú����̖�l�����ж�ú���ָ��ͼ�ָͣ�Ƥ��ݔ�͙C����ƫ����ƫ����̖�l��������ƫ���ָ��˞�һ�����������r�g����һ���r�g�Εr��ͬ�r�و��м�ָͣ��˞����������
����ɽ�|�����iKTC181Ƥ������ϵ�y�Թ������Ԅӿ��ƞ������O�������h�̸��A���o���Ԅӻ����aģʽ���OӋ������F�ˡ��o�˸��C���I�����˰�ȫֵ�ء��Ĺ������
���P�˺���